

制作无人机教程视频(学会这几步,小白也造无人机(无人机diy))
以前我是对制作无人机一无所知小白一个,去年看别人玩无人机,对无人机产生了浓厚兴趣,开始了解无人机知识。提起无人机这个词,大家脑海中一定浮现出一堆高科技、高大尚的感觉,对没接触过无人机的小白的我来说,自己做一台无人机似乎根本不可想象的,还好兴趣是做好的老师。我开始搜索各种资料,慢慢的发现制作一台基础无人机一点都不复杂,几大部件搞清楚,正确的连接与组合,只要肯动动手,人人可以DIY一台自己的无人机。作为一个Geek,这不是难事。我做的不是完全意义上的无人机,应该叫多旋翼飞行器(Multirotor),是一种具有两个旋翼以上的飞行器。由每个轴末端的电动机转动,带动旋翼从而产生上升动力。通过改变不同旋翼之间的相对速度可以改变推进力的扭矩,从而控制飞行器的运行轨迹。QQ飞控、CC3D、APM等等,多数都是抄板国外的,因为是开源的,功能很强大,价格很便宜,多数是百元以内。
多旋翼飞行器有多种形式如下:
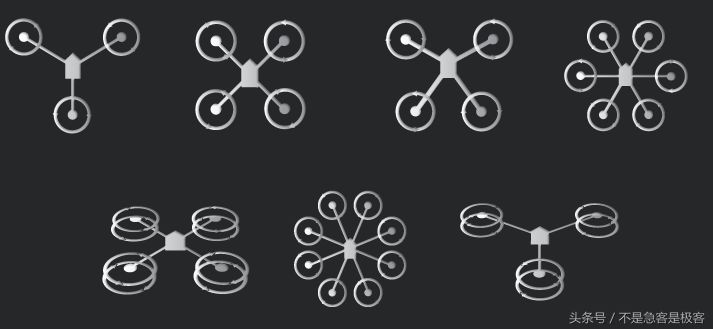
我们做的是第二种四轴飞行器。
无人机机架设计:
Solidwork工业设计图:

放入3d打印软件预览,自动添加悬空支撑

无人机动力部分采用720空心杯电机和55mm螺旋桨

螺旋桨:

飞控使用了Atmega328 主控芯片,高性能、低功耗 8位微控制器。
仿真图

芯片如图:

动力电机驱动: PWM脉冲控制的MOS管调节马达速度。N道沟的MOS,不需要门极驱动电路可与单片机引脚直接连接,导通电阻小。
姿态控制部分
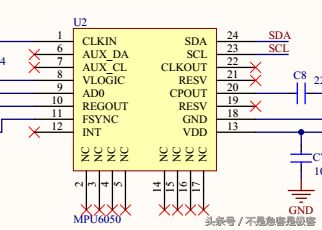
使用了mpu6060 陀螺仪,是一款低成本的6轴传感器模块,包括三轴加速度,三轴角速度。最主要的姿态传感器,其体积小巧,用途非常广。芯片如图:

电池 使用了3.7v聚合物电池。有点坑的是,充电2小时,能玩5分钟。

飞控程序使用wmc的c++开源程序,并更改config配置文件

MWC飞控,全称MultiWiiCopter,是目前国外一款比较流行的高性价比开源飞控。飞控源码可到
https://github.com/multiwii/multiwii-firmware 下载 。烧录飞控程序到芯片中,即可。组装图如下:
很简单的无人机就做好了。当然后续还有很重要的步骤,调节pid。在MWC中,PID参数调节是个比较耗时的问题。参数调试好了,很好飞;调试不好,可能比KK都不如。MultiWiiConf软件调参,如图

欢迎关注我,一起研究高科技产品!



