自己做无人机的视频(如何 DIY 一架稳得一匹的无人机?)
从玩无人机到现在,大概DIY过百十台多旋翼的无人机,所以把一些经验分享一下,
该文章较长,请耐心观看。因只能利用零散时间写作,所以会分开写。
先写系统,在写工具,然后写细节,最后整理格式。
写完会删除该段落,若未删除则是还在更新中。
DIY无人机不难,但是做一个稳得一匹的无人机挺难,需要的是细节,需要了解无人机各个系统的参数配合关系。
我将用最简单的大疆DIY450做一个案例。
无人机有四个部分组成,动力系统,机身系统,控制系统,任务系统。如果仅仅是DIY,那么就不需要任务系统。
动力系统
无人机动力系统包括四个部分,电池,电调,电机,螺旋桨。
 无人机动力系统
无人机动力系统电池选用Lipo电池,Lipo电池有三个核心指标,电压,容量,放电倍率,根据无人机的性能和大小选择不同的电池。
电调作用是调节电压大小,并且把直流电逆变为交流电,重要参数是位角和A数(通过的最大峰值电流),根据无人机调节位角,依据电池选择A数。
电机就是把电能转变为机械能,我们选择无刷电机,重要的参数是kv值和功率,保证电机功率和损耗差值小。
螺旋桨把机械能转变为动能,为无人机提供升力,大小、材质、动静平衡性能,都能影响无人机的稳定。
机身系统
机身系统包括机身,保护装置,脚架。
 多旋翼机架
多旋翼机架机身是无人机的承载身体,若无人机需要稳定,必须让身体固定,不固定的机身会产生振动,导致谐振,从而影响飞控过滤杂波。
保护装置是为了保护无人机的同时也保护他人。
脚架主要作用是支撑多旋翼重力;避免螺旋桨离地太近,而发生触碰;减弱起飞时的地面效应。
控制系统
控制系统主要是两部分,一个无人机自驾仪,也称为飞控,另一个就是远程控制系统,也称为遥控器(地面砖也可以属于远程控制系统,但是本章不予讨论)。
多旋翼自动驾驶仪,分为软件部分和硬件部分。包括:
1)全球定位系统(GPS)接收器;
2)惯性测量单元(IMU),包括三轴加速度计、三轴陀螺仪、电子罗盘(或磁力计),目的是得到多旋翼的姿态信息;
3)气压计和超声波测距模块;
4)微型计算机;
5)接口 DJI M Lite飞控
DJI M Lite飞控遥控器发送飞控手的遥控指令到接收器上,接收机解码后传给飞控制板,进而多旋翼根据指令做出各种飞行动.
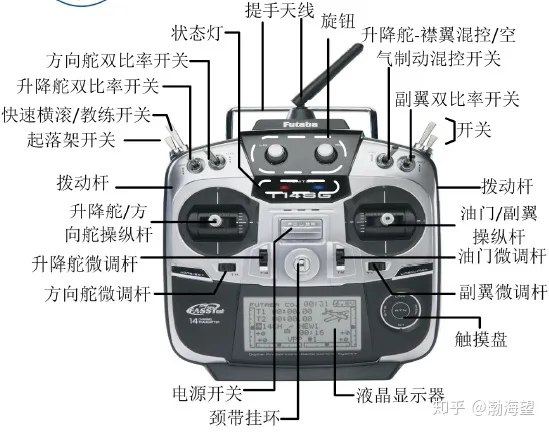 futeba遥控器机器定义
futeba遥控器机器定义DIY无人机
DIY无人机的第一步是定机身,这时需要知道几点要求,材质、布局、大小。
材质最佳是碳纤维,所有零件用卡槽和螺丝固定,固定的时候,使用螺纹胶把螺丝死死的卡住螺丝孔,每次只用一点点就可以,可以用好几年。
 螺纹胶
螺纹胶螺丝使用六角螺丝。
 六角螺丝
六角螺丝多旋翼布局,新手使用四旋翼X字布局,这种布局比较稳定,建议使用大疆风火轮450,这种机架比较便宜,几十块钱一套。
 多旋翼基本布局大疆风火轮机架
多旋翼基本布局大疆风火轮机架安装过程,一定要保持对称性,每个机臂夹角保持90°。
第二步,安装系统
安装飞控
安装飞控必须保证飞控安装在无人机的正中心,必须保证飞控安装在无人机的正中心,必须保证飞控安装在无人机的正中心,重要的话说三遍,使用3M胶固定,3M胶面积要够大,保证粘固牢靠,因为惯性测量单元需要固定,这样才可以正常工作。
其次是布线,线有两种,一种是杜邦线,传输信号,一种是电线,传输电流;两种线尽量分开,这样可以避免干扰。无人机是个高集成的产品,要做好每个细节。
安装动力系统前测试
螺旋桨需要做动静平衡,推荐一个螺旋桨动静平衡测试仪。
 动静平衡测试仪
动静平衡测试仪如果测试不平衡,则需要轻微打磨一下,达到一种平衡效果。
电调校准
(1)将电调的信号线与接收机的第三通道(即油门通道)连接,此时第三通道可以直接给电调信号。
(2)油门打到最大,给电调上电(连上电池),你会听到一段音乐声而后有两个“哔”音。成功捕获最大值。
(3)在两个“哔”音之后,再将油门摇杆打到最低,然后你会听到几声“哔”音(每一声代表你所使用的电池的一节),随后一个长“哔”声表示终点已被设定而且电调已校准。
(4)拔下电池。
一个电调油门行程校准完毕,另外三个重复以上步骤即可。电机固定
安装电机过程中,除了位置必须安装正确,还有一点就是电机必须在同一平面,安装电机的落实不可过长。
第三步调试
这步调试主要是无人机飞控参数的调试,包括飞控的参数,遥控器的参数。
如果我们想要一个无人机稳定,那灵活性就相对低一些,所以我们的参数要调的相对“肉一些”,比如推动副翼遥杆时,无人机的翻滚动作很大,那就把对应参数调小一些。其他以此类推。
这个视频是我大学时期做的,做的很一般,但是手里实在没啥视频了,所以我先上这个,勉强可以看。
室内脱控悬停