

无人机飞控介绍(无人机飞控概述——飞控算法)
飞控即飞行控制系统,是控制飞行器飞行姿态和运动的中枢设备,也称自动驾驶仪。大部分的无人机控制系统包括3个部分:遥控器、飞行控制系统和动作执行机构,其中遥控器包括发射机和接收机两个部分,在辅助级飞行控制系统中主要负责操作指令的输入和接收,并负责手动状况的飞行器控制;大部分无人机飞行控制系统是结合6自由度惯性测量单元、GPS导航接收机、磁航向计、气压高度计、转速传感器、数字信号处理器、ARM处理器、电源适配器等单元组成,主要负责感知飞机的各种状态并做导航计算和控制输出,是飞行控制系统的核心组成部分;动作执行机构包括舵机电机相关连杆等。
无人机飞控三大算法:捷联式惯性导航系统、卡尔曼滤波算法、飞行控制PID算法。
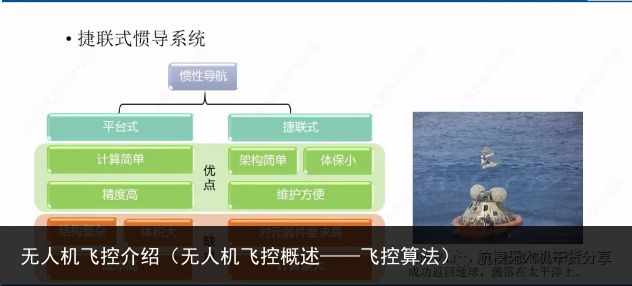
一、捷联式惯性导航系统
说到导航,不得不说GPS,他是接受卫星发送的信号计算出自身位置的,但是当GPS设备上方被遮挡后,GPS设备无法定位了。比如在室内、隧道内、地下等场所,基本收不到GPS信号。语录:任何一款有缺点的产品,必然成就了另一款能克服其缺点的产品。另一种导航方式是不依赖外界信息的,这种导航叫做惯性导航。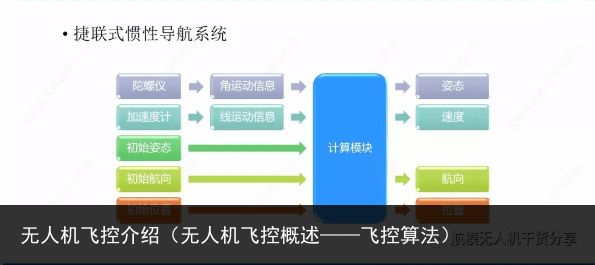

什么是卡尔曼滤波?
你可以在任何含有不确定信息的动态系统中使用卡尔曼滤波,对系统下一步的走向做出有根据的预测,即使伴随着各种干扰,卡尔曼滤波总是能指出真实发生的情况在连续变化的系统中使用卡尔曼滤波是非常理想的,它具有占用内存小的优点(除了前一个状态量外,不需要保留其它历史数据),并且速度很快,很适合应用于实时问题和嵌入式系统。 自动驾驶汽车使用激光雷达跟踪其他车辆,如何找到其他车辆?我想找到其他车辆的原因是我不想和其他车辆发生碰撞。为了进行评估 我们必须得先明白如何解释传感器数据。不知是明白其他车辆在那,还要知道速度是多少,这样你就可以避免与他们进行碰撞,这对行人和其他物体也很重要。知道其他车在那里,并且对他们将要去那里做出预测。卡尔曼滤波是一个非常流行的系统状态估计的方法,他和概率定位相当相似,我们之前学过的蒙特卡罗定位方法,主要区别是 卡尔曼是对一个连续状态进行估计,而蒙特卡罗将世界分成很多离散的小块,作为结果,卡尔曼给我们一个单峰分布,蒙特卡罗是多峰分布。这两种方法都适用与定位和对其他车辆的追踪。事实上粒子滤波也适用于定位和预测,粒子滤波是连续多峰分布的。卡尔曼滤波器的美妙之处在于,它将不够准确的传感器测量结果和不够准确的运动预测相结合,得到一个筛选后的位置估计值,这个估计值比所有仅来自传感器读数或运动预测的估计值更好。三、PID算法PID控制器是一种线性控制器,它主要根据给定值和实际输出值构成控制偏差,然后利用偏差给出合理的控制量。目前,人们通过科学研究获得了诸多具有优异控制效果的算法和理论,但在工程应用领域,基于经典PID的控制算法仍然是最简单、最有效的控制方案。PID控制器是一种线性控制器,它主要根据给定值和实际输出值构成控制偏差,然后利用偏差给出合理的控制量。目前主流的几款开源飞控中,无一例外地都是采用PID控制算法来实现无人机的姿态和轨迹控制。PID里的P是Proportion的首字线,是比例的意思,I是Integral的首字线,是积分的意思,D是Differential的首字母,是微分的意思。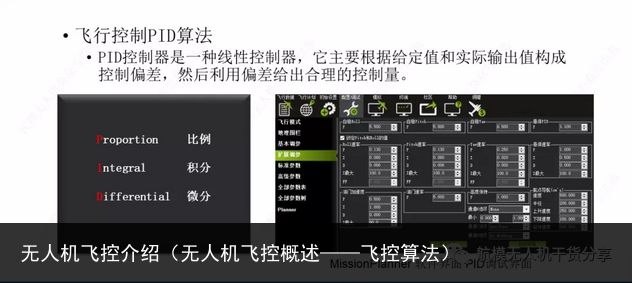
本文部分素材来自网络若有侵权联系删除



