

零零无限科技有限公司(如何评价零零无限 Hover 2 无人机的可旋转视觉雷达 Optical Radar?)
在评价这个可旋转的视觉雷达之前,先给这款飞机做一下定位,大家有一个评判预期,这样我们就可以评断出在怎样的资源下,这个设计的好与不好。关于这个回答中,所有图片均来自其官网还有宣传视频,只能够通过侧面的信息,去猜测相关的表现以及用途。
今天在公司群了看了他们的宣传片以及看了一下官网的资料,对这款飞机印象很深刻。
 产品宣传图
产品宣传图定位:
这款无人机在 kickstarter 上面
价格:$399(大概两千多)起步,封顶的顶配套餐是 $799(大概五千多)。预计是在明年发货。
人群定位:消费级无人机用户(初级无人机用户,毫无航拍经验)
使用定位:航拍娱乐,社交,旅游记录
价格对标:如果是从价格上面来看的话,可以横跨到:DJI Spark,DJI Mavic Air,DJI Mavic Pro(第一代)
参数对标:但是从官方的宣传上面看的话,实际上功能上对标的是:Skydio R1,DJI Mavic Air
 Skydio R1 全向避障 + Skydio SDK - $1999 起步价
Skydio R1 全向避障 + Skydio SDK - $1999 起步价 DJI Spark - 支持手势控制以及 DJI SDK - $399 起步价
DJI Spark - 支持手势控制以及 DJI SDK - $399 起步价 DJI Mavic Air - 4K Camera + 前后避障 + 手势控制 + DJI SDK - $799 起步价
DJI Mavic Air - 4K Camera + 前后避障 + 手势控制 + DJI SDK - $799 起步价先来说说视觉雷达的好处:
目前绝大多数无人机的避障都使用双目视觉模块来实现,远离就是通过计算机视觉快速地对真实世界做三维信息的构建,通过 depth 信息分析出和障碍物的距离。这个在大疆的机型中已经运用得相对成熟了,而一般大疆的飞机都采用 Movidius 的芯片,原因是因为功耗很低,而且解算效率也还可以。起码能够做到 15 赫兹左右的监测频率。
而大疆的飞机当中,实现全向避障的 Mavic Pro 2 系列,还有 Phantom 4 Pro V2(可能还有其他的产品线),基本都是在机身上不断地塞摄像头。我还没有去考究塞这么多摄像头本身要消耗多少电力,再加上解算的话电力就会进一步增加。而且重量也会影响无人机本身在空中的消耗。多一 1 克,电机都需要设计更多的冗余动力。所以并不是所有的飞机都实现全向避障。
但是 Skydio R1 这个奇葩产品就做了这样的事情。在机身上安置了 13 个摄像头,而且摄像头多用于航线预测和避障。要知道 Skydio R1 只有 16 mins 的飞行时间。
今天看到 Hover 2 的视觉雷达,让我觉得很兴奋,也很佩服这个设计师的设计,非常聪明地解决了这个问题。做法是直接地把视觉雷达做成会动的,从而减少了摄像头的增加。
 视觉雷达模块
视觉雷达模块因为飞机机头的方向只有一个,但是对于视觉雷达来说,却可以自由地旋转,这样的话可以想象得到飞机前行的时候,那么飞机就监测前方障碍,倒后飞行的时候雷达就以反方向监测,这样可以给飞控刹车的决策指令。这个设计就很“鸡贼”了。
总体来说这样的话,就用了两个摄像头解决了四个摄像头要做的事情,而且因为雷达会在飞行的过程中左右扫动,一定程度上能够扩大视觉模块的监测范围,继而把原本左右两侧的监测模块也减少了。可以说这一个设计,一定程度上用极少的资源,减少了摄像头的投入。这么一干的话,可以明显发现采购的零件少了,成本下降了,视觉处理器的压力少了,起码数据量是骤减的,重量也一定程度上减少了。(但是这里其实增加了电机,待会我会说)
说说不好的地方:
 Hover 2 in Skateboard Scene
Hover 2 in Skateboard Scene 其实这里用了一个不太好的示例。在滑板的场景中,尤其是这种,玩高速滑板的,那意味着无人机能够高速运动,并对人物进行跟踪。以目前 Hover 2 释放出来的信息来看,高速飞行以及快速主动避开障碍,应该还是会吃力的。这个小的预判从下面的硬件参数上得出。也希望实测可以对我的这个预判给予否定。
而且电机的增加,在高速运动,不断变动机头的姿态飞行的时候,这个雷达如果要跟上高速的运动则以为着雷达电机的高速转动。显然,这会收到限制,再说,电量的消耗也大。
 SLAM 与视觉惯性里程并不是万能的
SLAM 与视觉惯性里程并不是万能的比如图例中这个场景,其实明显深度信息拿得还不够,从飞行轨道预测上,应该是足以让无人机在丛林中穿越过去的,但是成功率就值得怀疑了。如果是 Mavic Air 啊,Mavic Pro 啊这些肯定是直接提示你别飞行了,更别说自动飞行了。但是 Skydio R1 的飞机从 YouTube 上面大量的评测看,成功概率非常高。
这一方面需要对三维信息掌握得足够准确,也需要飞机在本身的航线预测上,有足够高的判定值,飞机才会飞过去,我相信除了本身三维的信息以外,还会有一些 Machine Learning 的 Module 用于 航线预测上。但这两者都依赖处理器。
 Hover 2 采用 Qualcomm 的开发平台以及处理器
Hover 2 采用 Qualcomm 的开发平台以及处理器Hover 2 采用的是 Qualcomm snapdragon 处理器,而这个处理器一般用于智能手机上面,据说 Go Pro 也是用这个处理器。好处当然是相对便宜啦,坏处就当然是处理性能了。对于视觉雷达来说,就是刚好了。但是如果遇到一些光线不足,或者是相对复杂一点的情况,估计性能冗余就没有了,那么这个避障的效果应该会受到影响。虽然没有说具体使用的是什么 model 的 snapdragon,但是如果你回想一下 Samsung S9,GoPro 等设备,大概可以感受到。
除了让飞行器的飞行速度受限之外,对于物体以及人物的姿态识别应该也会受限。毕竟,处理性能有限。这个受限是跟下面这个怪兽来比的。
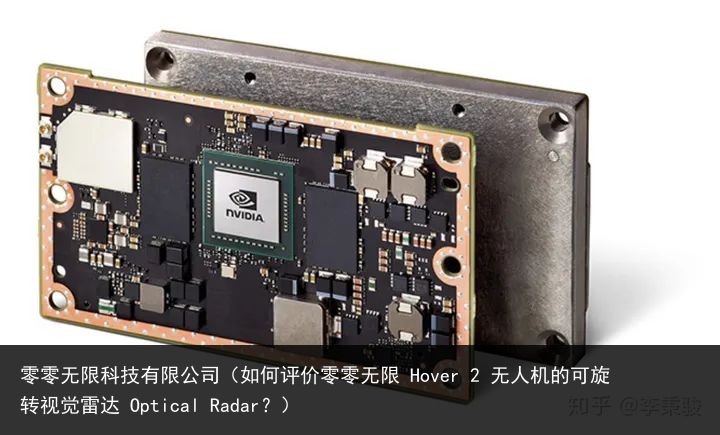 Skydio R1 的 Jetson Module
Skydio R1 的 Jetson Module Skydio R1 用的是顶级的配置了,Super COMPUTER,256-core Nvidia Jetson GPU,Quad-core 64-bit ARM CPU,4GB RAM。这个芯片的目标就是向 EDGE Computing 出发的,将 AI 部署到 ROS 上。况且,你想想,这是一台拥有 13 个摄像头的无人机啊,等同于把计算机视觉引入到飞控决策当中了。所以如果你看 Skydio R1 的评测视频的话,你会发现这台设备在空中的姿态调整速度极快。这也跟敏感的传感器,以及敏感的避障算法有一定的关系。基本上极限运动,高速追踪这台飞机玩得 666 了。
当然价格也很感人,16 分钟飞行时间的飞机,要过万的人民币。真高端玩具了。不过貌似最近 Skydio 也在做 SDK,如果开放视觉模块,会有很多有趣的东西出现。
 Skydio R1 在丛林跟踪人物跑步
Skydio R1 在丛林跟踪人物跑步总体而言:
你用 $399 的价钱,去尝试体验到 $1999 带来的乐趣。再说摄像头的性能也很棒了,也不是定位什么极限运动玩家,用来旅行航拍,轻便,高清,可玩的点足够丰富,这才是用户想要的。
我对这款飞机还是非常看好的,用足够少的资源,打造出一台玩意极高的飞机,而且也让更多人体验到无人机带来的乐趣。再说,加了遥控器,这台飞机可以飞好几公里(宣传称),那么还是比 Skydio R1 的用户体验要棒。
目前来看,这个设计(可旋转视觉雷达 Optical Radar)还是一个好设计。




