多旋翼无人机构造图解说明(带你了解多旋翼无人机)

非常抱歉,昨天事情太多没有更新,今天一忙完就赶紧来了,尽量早点发出来。话不多说,我们直接入题:
今天我们来介绍一下多旋翼无人机(MUA),它主要被用在民用领域,军用领域现在很少见,但前景是良好的。它的机动性是通过改变旋翼的扭力和转速来实现的,特点就是可以垂直升降、低空飞行、空中悬停、原地打转等等,这些都是固定翼所没有的,所以它在我们日常生活中应用得更广一点。像植保、巡线、刑侦以及救援等都有它的身影,当然还有我们现在越来越流行的航拍。领域不同需求也不同,对性能要求有各自的侧重点。


多旋翼无人机可以依据编程指令自主飞行,它对环境要求很低,有的甚至在室内都可以飞,适应性非常强,所以常常被用来完成各种危险工作。多旋翼无人机有多种不同的分类方法,下面我就来一一列举一下:
1、按轴数分类:
有三轴四轴甚至十八轴的,按发动机个数分有三旋翼、四旋翼、八旋翼甚至十八旋翼等。轴和旋翼的含义有时相同有时也是不同的,如四轴八旋翼是将每个轴上下各安装一个电机构成八旋翼。



2、按动力装置分类:
可分为油动多旋翼无人机、电动多旋翼无人机以及油电混合多旋翼无人机
3、按重量分类:
微微型多旋翼无人机:空机重量和起飞全重小于1.5KG。
微型多旋翼无人机:空机质量介于1.5-4KG,起飞全重介于1.5-7KG。
轻型多旋翼无人机:空机重量介于4-15KG,起飞全重介于7-25KG。
小型多旋翼无人机:空机重量介于15-116KG,起飞全重介于25-150KG。
大型多旋翼无人机:空机重量大于116KG,起飞全重大于150KG。
下面我来介绍一下多旋翼无人机的结构:
结构系统、飞控系统、动力系统、机载链路系统构成了整个多旋翼无人机系统。如图为它的系统简图:
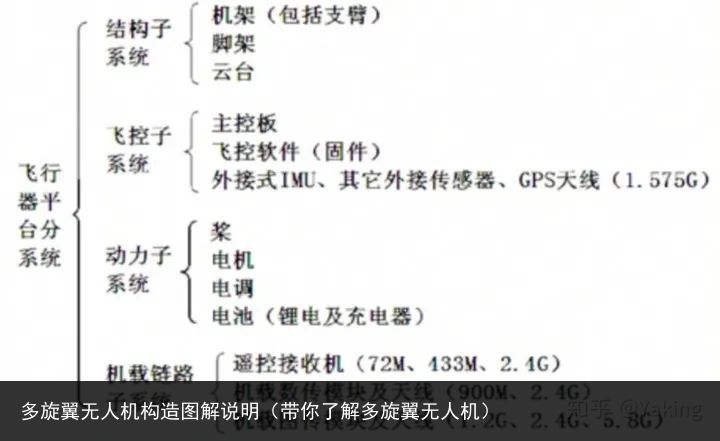
下面我来简单介绍几个难懂的部件:
第一个云台:我相信很多人和我一样,第一眼看到这俩字都很懵,不知道是啥。其实它就是一个架子,上边可以放各种东西,最常见的就是放照相机,一看图你就知道了:

第二个电机:多旋翼的电机主要以无刷直流电机为主,通过电机将电能转化为机械能,它的参数一般用四个数字表示,前两位是电机转子直径,后两位是电机转子高度。所以前两位越大则电机越肥,后两位越大则电机越高,越肥越大的电机一般功率就越大,可以用在大四轴多旋翼上。另外,每个电机都有一个推荐的螺旋桨,如果二者不匹配容易发生安全事故,也可能你飞都飞不起来。

第三个电调(ESC):在整个飞控系统中,电调主要提供驱动电机的命令,由它将飞控系统的控制信号转变为电流信号,用于控制电机转速。上边我们说了电机与螺旋桨之间要互配,电机与电调也差不多,它俩要有较好的兼容性,否则会发生堵转。

这便是今天的内容。随着无人机的发展,关于无人机安全性的问题受到人们热烈的讨论,明天我就来介绍一下有关无人机法律方面的知识。。。