无人机涉及哪些技术(无人机有哪些关键技术?)
我来说说,有关代码上的技术。
飞控的代码就不多说了,这个问题大疆的人是这样说的https://www.zhihu.com/question/45766810/answer/100301388。我用过一段DJI的M100,也自己攒过飞机,说实话DJI做的东西确实用起来很顺手。飞控做的好绝非自夸自赞。我们老板在分析的时候说的更加精辟,从电机的驱动器说起,李泽湘以及他的团队在电机驱动这块的技术做的很好。
四旋翼用的无刷电机,上边的电调,DJI在这上边,有一个词来形容,浸润多年。凭着非常定制化的(为啥说定制话,有一个开源飞控叫做ardupilot,他的的代码可以实现各种pilot,不论是天上飞的旋翼copter、固定翼plane、还是地上跑的车rover,都能在那个工程里找到代码)一个方案,使得DJI的四旋翼能够总是飞得比较稳。
说到这,你可能就会发现一个问题,大疆只是在做四旋翼,然而我们是不是换条路,换个方式,举个例子,垂直起降的固定翼,这个国内国外都有人在做,有些做的还不错。
看了好多答案都在围绕飞控、云台、相机、图传、机体结构等等。这些称的上是技术壁垒吗?从无到有我觉得不算,现在拼的更多的是做的更快、更强、更稳。这些技术上更像一个比赛,可以说这里边每一项技术,大疆都有很好产品对应。仅仅看到这些,思路就限制住了,只能停留在航拍、四旋翼的那条路上,仍然一心在做这方面的人,我相信在短时间内,很少会有人跑的赢DJI。其实更多的机遇在那些DJI还未做好,仍然停留在科研阶段,即将迈入工业界的技术,这些更加值得我们注意,也是更有可能做赢做好的地方。
SLAM,为啥要有SLAM,因为飞机上基本的定位方法是用GPS,如果你的飞机真的只能用GPS定位,那么这意味着这个飞机很多地方不能用,尤其是室内。你会说没有GPS,飞机照样能飞,确实是这样,然而那种情况下,你要紧紧攥这遥控,因为如果不进行手动调整的话,飞机很快就会飘走。其实这方面DJI已经有一款不错的产品,Guidance,这个还装在很多DJI自己的飞机,精灵4,mavic,新出的spark似乎也有。SLAM这个东西随便在一个扫地机器人上都会找到(这里用的是激光的),那些做AR的人也在做SLAM(视觉的),还包括做无人车(视觉激光都会有)的公司。像SLAM这种定位方法,玩的人太多了,以至于你能够伸手就会找到一堆代码,还能在图像数据集上跑出像模像样的效果。另外不论是避障、手势操作、还是电子增稳,这些技术拿出来,说是黑科技,真的是有点牵强,因为在科研上,这些真的已经被做烂了,在opencv、github只要你想做,分分钟就可以找出代码,跑出效果。这些就是所谓即将迈入工业界的技术。
然而就像https://www.zhihu.com/question/45766810/answer/100301388 说的
机器人学亟待解决的问题不是如何让机器人学会高级的推理,而是让机器人学会基本的感知和活动,否则高级的推理只是空中楼阁。这里视觉上的技术没有谁是做的最好的,这些视觉技术想要用在无人机应用并且让他显得不是那么多余,很实用,必须能够应对方方面面的考验,否则再花哨漂亮的技术,不会给产品增加亮点,反而会让人觉得这个设计真的很蠢。
路径规划,以后飞机不能总是跟着你跑吧,你想然他去做一件事,去去一个快递,那时候,这个飞机不光需要知道自己在哪还需要知道快递在哪,这里涉及到快递的识别定位,路径规划,轨迹规划,避障等等。如果想让无人机去电网巡线,总是那个遥控不好吧,要让飞机沿着导线走吗,走到导线有问题的地方停,这里涉及到导线的检测,这些导航路径规划等技术在无人机的应用级方案十分重要。
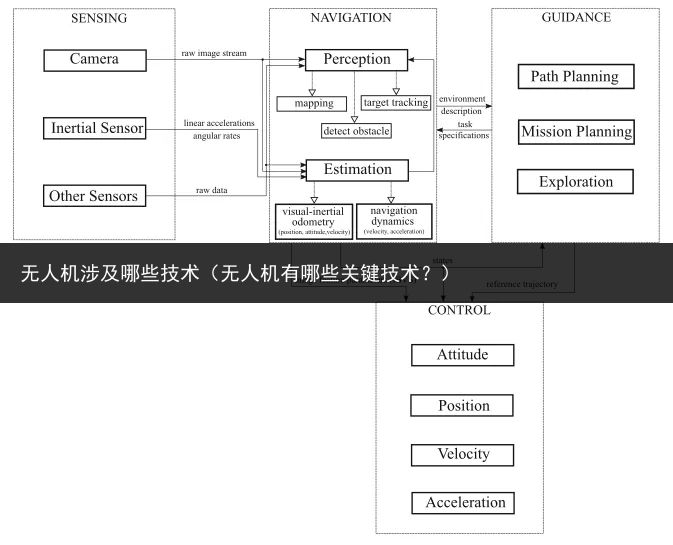
这里总结下,其实我们分了三个层次来介绍无人机的技术,最底层是控制,上边是导航避障相关的环境感知,最高层是任务级的路径、轨迹规划、目标识别等。最后上图