

多旋翼无人机驾驶证考试内容(多旋翼无人机的“尺子”——光学动作捕捉系统)
多旋翼无人机一定是从实验室飞出去的。多旋翼无人机开发过程中需要一把高精度“尺子”来实时测量其位姿信息及运动轨迹。目前市面上最好的工具是光学动作捕捉系统。那光学动作捕捉系统在四旋翼开发过程中到底起到了什么作用呢?
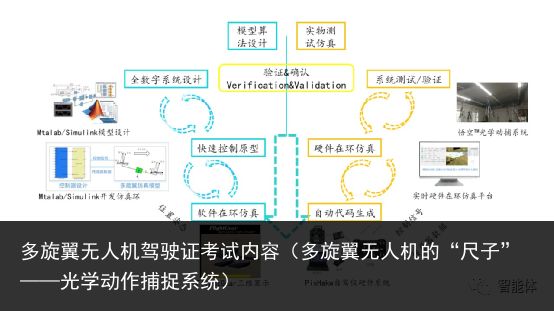 图1多旋翼无人机飞控开发验证2、集群定位,在多智能体集群控制系统中,光学动作捕捉系统可以使得智能体知道“我”在哪?“你”在哪?“我”下一步要做什么?
图1多旋翼无人机飞控开发验证2、集群定位,在多智能体集群控制系统中,光学动作捕捉系统可以使得智能体知道“我”在哪?“你”在哪?“我”下一步要做什么?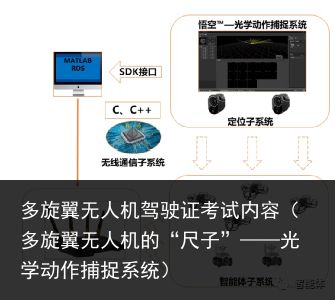 图2 多智能体集群控制技术框架3、轨迹跟踪,可以高精度实时捕捉四旋翼无人机的飞行轨迹,且提供6DoF位姿坐标。
图2 多智能体集群控制技术框架3、轨迹跟踪,可以高精度实时捕捉四旋翼无人机的飞行轨迹,且提供6DoF位姿坐标。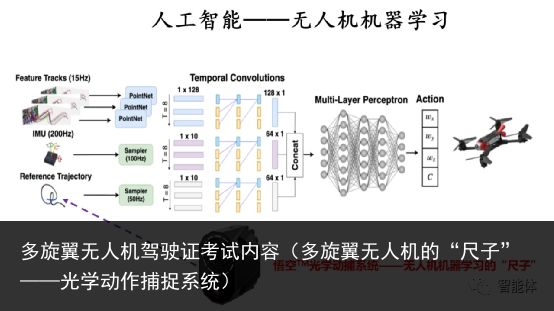 图3 多旋翼无人机轨迹追踪验证
图3 多旋翼无人机轨迹追踪验证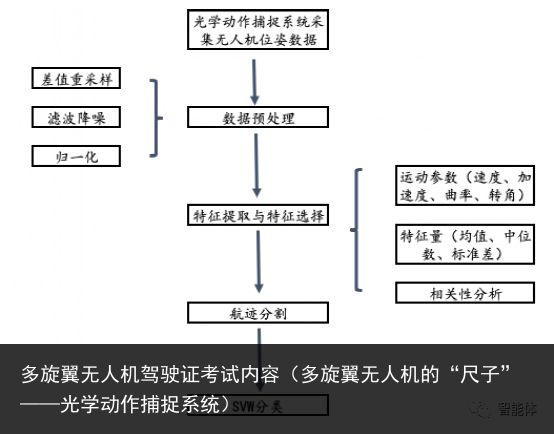 图4 多旋翼无人机运动状态识别框架自从无人机的概念提出以后,多旋翼的研究一直是无人机研究领域的热点之一,随着新型材料、微机电系统(MEMS),传感器技术和飞行控制等技术的不断发展,多旋翼无人机的机身体积和重量大大减轻,结构和稳定性也得到了很大的优化,多旋翼无人机得到了快速发展。近年来,多旋翼无人机不管是科学方面研究还是在商业化方面都有越来越多的关注,广泛应用于知名高校,企业和科研机构。下面我们看看国外的顶尖实验室都在做什么?【麻省理工学院】麻省理工学院(Massachusettes
Instiute of Technology,MIT)的RAVEN(Real-Time Indoor Autonomous Vehcile
Test
Environment)实验室,内部装有18台光学动作捕捉相机,可以实现无人机的室内实时定位,实验室内还有多辆自主的地面小车,研究对象由Draganflyer
V Ti Pro多旋翼无人机和无人小车组成。MIT的无人机集群康管理计划(UAV SWARM Health Management
Project)主要研究多架无人机的任务管理、任务分配和轨迹追踪算法,目前该项目已完成了室内环境下四旋翼无人机的飞行演示。图5为多架四旋翼无人机对目标进行连续搜索和跟踪实验,图6为多机系统和编队飞行实验。
图4 多旋翼无人机运动状态识别框架自从无人机的概念提出以后,多旋翼的研究一直是无人机研究领域的热点之一,随着新型材料、微机电系统(MEMS),传感器技术和飞行控制等技术的不断发展,多旋翼无人机的机身体积和重量大大减轻,结构和稳定性也得到了很大的优化,多旋翼无人机得到了快速发展。近年来,多旋翼无人机不管是科学方面研究还是在商业化方面都有越来越多的关注,广泛应用于知名高校,企业和科研机构。下面我们看看国外的顶尖实验室都在做什么?【麻省理工学院】麻省理工学院(Massachusettes
Instiute of Technology,MIT)的RAVEN(Real-Time Indoor Autonomous Vehcile
Test
Environment)实验室,内部装有18台光学动作捕捉相机,可以实现无人机的室内实时定位,实验室内还有多辆自主的地面小车,研究对象由Draganflyer
V Ti Pro多旋翼无人机和无人小车组成。MIT的无人机集群康管理计划(UAV SWARM Health Management
Project)主要研究多架无人机的任务管理、任务分配和轨迹追踪算法,目前该项目已完成了室内环境下四旋翼无人机的飞行演示。图5为多架四旋翼无人机对目标进行连续搜索和跟踪实验,图6为多机系统和编队飞行实验。 图5 无人机目标搜索和跟踪实验
图5 无人机目标搜索和跟踪实验 图6 十架无人机多机协同【斯坦福大学】斯坦福大学(Stanford
University)的STARMASC(Stanford Testbed of Autonomous Rotorcraft for
MultiAgent
Control)项目是为了测试和验证多机算法和控制策略,它包含多个能够使用GPS和IMU传感器进行轨迹跟踪的四旋翼飞行器。Hoffmann G
M团队基于斯坦福大学的试验台,首先将四旋翼无人机的非线性模型线性化,然后使用LQR控制方法设计了姿态控制器,使用滑模控制方法设计了高度控制器,并取得了良好的控制效果。、【宾西法尼亚大学】宾夕法尼亚大学的GRASP(General
Robotics,Automation,Sensing and
Perception)实验室对无人机的控制进行了大量研究,并且基于光学动作捕捉系统搭建了无人机测试平台,主要研究对象如图7所示。主要研究内容包括对多旋翼无人机的搭建、多旋翼无人机自主飞行控制算法和多架无人机系统控制算法的研究。通过大量实验,GRASP实验室已经取得了很多创新成果,在该无人机测试平台下,无人机体现出很大的机动性,能够完成无人机集群航迹追踪、协同合作和编队飞行等测试,图8为多旋翼无人机协同飞行。
图6 十架无人机多机协同【斯坦福大学】斯坦福大学(Stanford
University)的STARMASC(Stanford Testbed of Autonomous Rotorcraft for
MultiAgent
Control)项目是为了测试和验证多机算法和控制策略,它包含多个能够使用GPS和IMU传感器进行轨迹跟踪的四旋翼飞行器。Hoffmann G
M团队基于斯坦福大学的试验台,首先将四旋翼无人机的非线性模型线性化,然后使用LQR控制方法设计了姿态控制器,使用滑模控制方法设计了高度控制器,并取得了良好的控制效果。、【宾西法尼亚大学】宾夕法尼亚大学的GRASP(General
Robotics,Automation,Sensing and
Perception)实验室对无人机的控制进行了大量研究,并且基于光学动作捕捉系统搭建了无人机测试平台,主要研究对象如图7所示。主要研究内容包括对多旋翼无人机的搭建、多旋翼无人机自主飞行控制算法和多架无人机系统控制算法的研究。通过大量实验,GRASP实验室已经取得了很多创新成果,在该无人机测试平台下,无人机体现出很大的机动性,能够完成无人机集群航迹追踪、协同合作和编队飞行等测试,图8为多旋翼无人机协同飞行。 图7 宾夕法尼亚大学Hummingbird
图7 宾夕法尼亚大学Hummingbird 图8 多旋翼无人机协同飞行【瑞士联邦理工学院】近几年瑞士联邦工学院在四旋翼无人机方面取得了突出的成果,2007年,基于光学动作捕捉系统建立了FMA(Flying
Machine Arena)测试平台,测试平台内部安装了8个光学动作捕捉系统的相机。在FMA测试平台的环境下,D‘Andrea
R团队在研究飞行器自主飞行控制律、飞行机构设计、室内光学动作捕捉系统和高机动智能飞行方面取得了比较丰硕的成果,并在全球各地做了多次公开演示,在2011年12月发过奥尔良的公开演示中,多个四旋翼无人机协同合作完成了泡沫砖塔的搭建,图9位正在抓取泡沫砖块的四旋翼无人机。
图8 多旋翼无人机协同飞行【瑞士联邦理工学院】近几年瑞士联邦工学院在四旋翼无人机方面取得了突出的成果,2007年,基于光学动作捕捉系统建立了FMA(Flying
Machine Arena)测试平台,测试平台内部安装了8个光学动作捕捉系统的相机。在FMA测试平台的环境下,D‘Andrea
R团队在研究飞行器自主飞行控制律、飞行机构设计、室内光学动作捕捉系统和高机动智能飞行方面取得了比较丰硕的成果,并在全球各地做了多次公开演示,在2011年12月发过奥尔良的公开演示中,多个四旋翼无人机协同合作完成了泡沫砖塔的搭建,图9位正在抓取泡沫砖块的四旋翼无人机。 图10 四旋翼无人机抓取泡沫抓块【关于光学动作捕捉系统】光学动作捕捉系统最早用在影视特效行业,随着无人机等智能体技术高速发展,其也逐渐成为智能体开发的有利工具。前些年国际上有一些公司在做光学动作捕捉系统,VICON是最早的鼻祖。近些年国内也有了相关的技术,比如下面要介绍的悟空光学动作捕捉系统。悟空光学动作捕捉系统是纯国产技术,性价比优秀,技术支持到位。
图10 四旋翼无人机抓取泡沫抓块【关于光学动作捕捉系统】光学动作捕捉系统最早用在影视特效行业,随着无人机等智能体技术高速发展,其也逐渐成为智能体开发的有利工具。前些年国际上有一些公司在做光学动作捕捉系统,VICON是最早的鼻祖。近些年国内也有了相关的技术,比如下面要介绍的悟空光学动作捕捉系统。悟空光学动作捕捉系统是纯国产技术,性价比优秀,技术支持到位。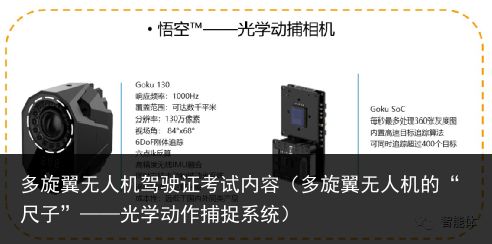 、图11 悟空光学动作捕捉相机【捕捉的数据】
、图11 悟空光学动作捕捉相机【捕捉的数据】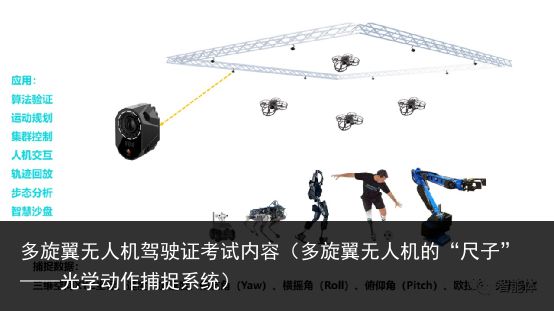 图12光学动作捕捉系统捕捉的数据【支持的格式和接口】
图12光学动作捕捉系统捕捉的数据【支持的格式和接口】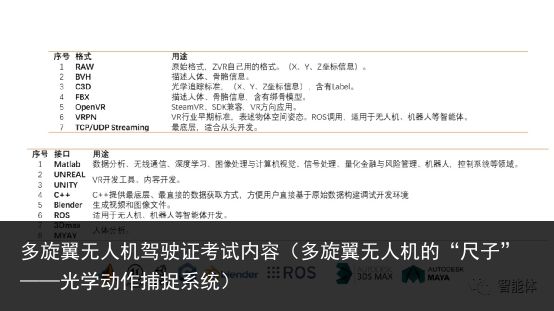 图13 悟空光学动作捕捉系统提供的SDK
图13 悟空光学动作捕捉系统提供的SDK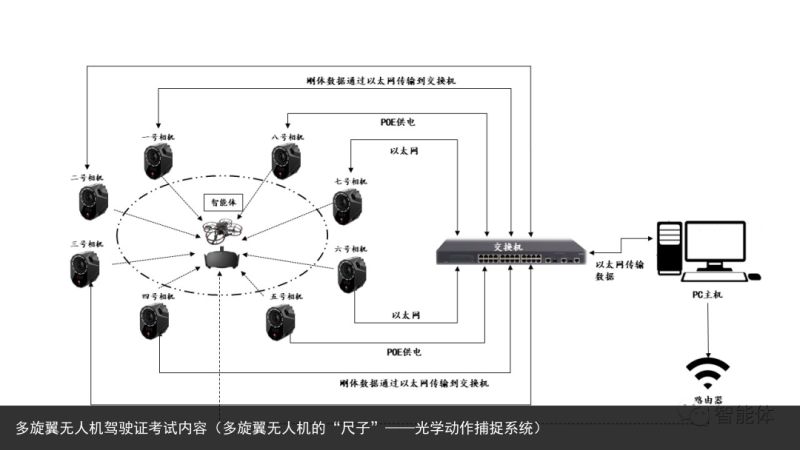 图15 系统构成下面我们看一下基于悟空光学动作捕捉系统做的一些四旋翼无人机的实验【无人机载满杯水集群飞行】【无人机单轴挂载重物精准悬停】【无人机载满杯水航迹稳定飞行】无人机无论对于军用还是民用都有着不可估量的前景,作为无人机算法的一把“尺子”我们愿意为我们国家的科研和创新贡献自己的一份力量,非常欢迎无人机科技公司和高校、科研院所的科研、技术人员一起沟通探讨。天地庄周马,江湖范蠡船。
图15 系统构成下面我们看一下基于悟空光学动作捕捉系统做的一些四旋翼无人机的实验【无人机载满杯水集群飞行】【无人机单轴挂载重物精准悬停】【无人机载满杯水航迹稳定飞行】无人机无论对于军用还是民用都有着不可估量的前景,作为无人机算法的一把“尺子”我们愿意为我们国家的科研和创新贡献自己的一份力量,非常欢迎无人机科技公司和高校、科研院所的科研、技术人员一起沟通探讨。天地庄周马,江湖范蠡船。
先下一个定义,光学动作捕捉系统相当于多旋翼无人机算法的一把“尺子,能够实时以0.1mm精度捕捉多旋翼无人机6DoF位姿信息。
光学动作捕捉系统在四旋翼无人机开发过程中起到的作用如下:1、算法验证,定位精度达0.1mm。开发人员不用考虑定位问题,可以直接钻研控制算法问题。有助于算法的开发、验证、优化。图1多旋翼无人机飞控开发验证2、集群定位,在多智能体集群控制系统中,光学动作捕捉系统可以使得智能体知道“我”在哪?“你”在哪?“我”下一步要做什么?图2 多智能体集群控制技术框架3、轨迹跟踪,可以高精度实时捕捉四旋翼无人机的飞行轨迹,且提供6DoF位姿坐标。图3 多旋翼无人机轨迹追踪验证图4 多旋翼无人机运动状态识别框架自从无人机的概念提出以后,多旋翼的研究一直是无人机研究领域的热点之一,随着新型材料、微机电系统(MEMS),传感器技术和飞行控制等技术的不断发展,多旋翼无人机的机身体积和重量大大减轻,结构和稳定性也得到了很大的优化,多旋翼无人机得到了快速发展。近年来,多旋翼无人机不管是科学方面研究还是在商业化方面都有越来越多的关注,广泛应用于知名高校,企业和科研机构。下面我们看看国外的顶尖实验室都在做什么?【麻省理工学院】麻省理工学院(Massachusettes
Instiute of Technology,MIT)的RAVEN(Real-Time Indoor Autonomous Vehcile
Test
Environment)实验室,内部装有18台光学动作捕捉相机,可以实现无人机的室内实时定位,实验室内还有多辆自主的地面小车,研究对象由Draganflyer
V Ti Pro多旋翼无人机和无人小车组成。MIT的无人机集群康管理计划(UAV SWARM Health Management
Project)主要研究多架无人机的任务管理、任务分配和轨迹追踪算法,目前该项目已完成了室内环境下四旋翼无人机的飞行演示。图5为多架四旋翼无人机对目标进行连续搜索和跟踪实验,图6为多机系统和编队飞行实验。图5 无人机目标搜索和跟踪实验图6 十架无人机多机协同【斯坦福大学】斯坦福大学(Stanford
University)的STARMASC(Stanford Testbed of Autonomous Rotorcraft for
MultiAgent
Control)项目是为了测试和验证多机算法和控制策略,它包含多个能够使用GPS和IMU传感器进行轨迹跟踪的四旋翼飞行器。Hoffmann G
M团队基于斯坦福大学的试验台,首先将四旋翼无人机的非线性模型线性化,然后使用LQR控制方法设计了姿态控制器,使用滑模控制方法设计了高度控制器,并取得了良好的控制效果。、【宾西法尼亚大学】宾夕法尼亚大学的GRASP(General
Robotics,Automation,Sensing and
Perception)实验室对无人机的控制进行了大量研究,并且基于光学动作捕捉系统搭建了无人机测试平台,主要研究对象如图7所示。主要研究内容包括对多旋翼无人机的搭建、多旋翼无人机自主飞行控制算法和多架无人机系统控制算法的研究。通过大量实验,GRASP实验室已经取得了很多创新成果,在该无人机测试平台下,无人机体现出很大的机动性,能够完成无人机集群航迹追踪、协同合作和编队飞行等测试,图8为多旋翼无人机协同飞行。图7 宾夕法尼亚大学Hummingbird图8 多旋翼无人机协同飞行【瑞士联邦理工学院】近几年瑞士联邦工学院在四旋翼无人机方面取得了突出的成果,2007年,基于光学动作捕捉系统建立了FMA(Flying
Machine Arena)测试平台,测试平台内部安装了8个光学动作捕捉系统的相机。在FMA测试平台的环境下,D‘Andrea
R团队在研究飞行器自主飞行控制律、飞行机构设计、室内光学动作捕捉系统和高机动智能飞行方面取得了比较丰硕的成果,并在全球各地做了多次公开演示,在2011年12月发过奥尔良的公开演示中,多个四旋翼无人机协同合作完成了泡沫砖塔的搭建,图9位正在抓取泡沫砖块的四旋翼无人机。图10 四旋翼无人机抓取泡沫抓块【关于光学动作捕捉系统】光学动作捕捉系统最早用在影视特效行业,随着无人机等智能体技术高速发展,其也逐渐成为智能体开发的有利工具。前些年国际上有一些公司在做光学动作捕捉系统,VICON是最早的鼻祖。近些年国内也有了相关的技术,比如下面要介绍的悟空光学动作捕捉系统。悟空光学动作捕捉系统是纯国产技术,性价比优秀,技术支持到位。、图11 悟空光学动作捕捉相机【捕捉的数据】图12光学动作捕捉系统捕捉的数据【支持的格式和接口】图13 悟空光学动作捕捉系统提供的SDK图15 系统构成下面我们看一下基于悟空光学动作捕捉系统做的一些四旋翼无人机的实验【无人机载满杯水集群飞行】【无人机单轴挂载重物精准悬停】【无人机载满杯水航迹稳定飞行】无人机无论对于军用还是民用都有着不可估量的前景,作为无人机算法的一把“尺子”我们愿意为我们国家的科研和创新贡献自己的一份力量,非常欢迎无人机科技公司和高校、科研院所的科研、技术人员一起沟通探讨。天地庄周马,江湖范蠡船。
业务联系:王经理 13810896844
往期推荐阅读往期热文(点击文章标题即可直接阅读):



