

无人机飞控的主要功能(城堡里学无人机:飞控详解-发展历史到产品系统设计)
世界变化快,我们虽在不知不觉间经历着事物的变化,未必能够意识到变化的发生,至于思考就更是奢求。而在无人机行业,思考却比什么都重要。
九十年代商务潮人标配大哥大+BP机,千禧年后出现了“手机”这个词,功能上实现了大哥大与BP机的结合:Dial+Massage。之后手机的结构实现了从按键到键盘再到触屏的变化过程,现如今哪款手机没有系统,没有APP,没有网络功能都不敢加上“手机”二字。对于手机概念的理解不同,技术与产品方向也会不同。看似明确的变化过程中无数企业灰飞烟灭。

对于无人机行业而言,飞控系统是当之无愧的系统核心,而它又处在怎样的变化之中呢?

二十一世纪之前国内很少听到“无人机”这个词,更多的是遥控飞机或者航模。八零后的朋友们应该还记得“舒克和贝塔”这部动画片,第四集中两只小老鼠帮助皮皮鲁赢得了航模比赛。那时的航模还没有“控”,因此除了舒克操控的直升机航模外,其他小朋友都使用相对容易操控的固定翼航模。
2000年以后随着MEMS技术的发展以及电子航空发烧友的增加,从航模向无人机的转变趋势日趋明显,很多FCM,FCU(Flight Control Module/Unit,词条解释请移步:城堡里学无人机:无人机行业用语词典(Keep 更新ing),下同)开始出现在人们面前:国内的KK,QQ,玉兔等,法国的MWC,德国的MikroKopter,Auto Quad,美国的Apm系列,穿越机常见的CC3d,Naze32,F3等。这些FCU通过相应的控制算法,对无人机系统反馈的状态信息(城堡里学无人机:状态视角深入无人机硬件与算法)进行解算,根据解算出的状态数据结合算法(一般为线性控制算法)计算控制量并输出。FCU本身往往只涉及很小一部分状态信息的采集,同时内部算法一般只针对无人机本身的姿态控制或者轨迹跟踪(很少)。因此在系统硬件构成上不包含某些状态信息获取单元如GPS,超声,红外,光流,双目等,或者不对某些状态信息进行处理(如某些不处理外环状态)。

在2012年之后,随着航拍等市场需求的挖掘,无人机控制开始从FCM,FCU转向FCS(Flight Control System),无人机厂家开始生产各自的飞控产品,该类产品更多是应用在该企业无人机产品所面对的市场领域。这类产品与FCU在系统范围(或元素组成)上有着明显的区别,一般不止包括FCU所涵盖的范畴,也包括数据获取(如云台、摄像头等)模块,数据通讯模块,GPS模块,配套的地面站(PC端,移动端),SDK等。
但这种转型并没有彻底完成,由于FCS的系统架构,系统设计,相关算法,地面站功能等各个方面都与无人机本身的应用行业息息相关,对于企业而言,真正的难点在于如何实现无人机技术与行业应用的衔接,即FCS的产品设计与技术发展不止于无人机,更重要的是延伸到无人机应用的行业中去。

在无人机行业应用中一批企业已经走在前面,有的企业提供整机服务如极飞、DJI等。也有企业专注于提供行业FCS,其中成熟的产品如上海TopXGun(拓攻)的植保机专用飞控:T1-A及行业飞控Top-D1(第十三届上海模型展览会正在召开,包括拓攻这两款FCS在内的很多产品都已参展,有兴趣的朋友可以在读完本文后面内容后去展会现场看一看行业级FCS产品与实机演示效果)
MR.城堡将以这一类产品为例与大家分享行业FCS在设计与实现中需要考虑的问题与处理方案。
无人机是基于任务的智能机器人系统,整体设计要根据专门的行业应用进行调整。这种调整势必面临来自稳定性、控制精度、行业适应性三个方面的挑战。
1.稳定性

稳定性方面,行业无人机需要面对更加复杂的外部环境:强风干扰,强磁干扰,以及特殊情况下的系统稳定性,如大电流情况下的系统稳定性,高温度作业环境中的系统稳定性等等。无论哪种情况,FCS都会首当其冲。如强风干扰下能否在维持快速响应的同时降低相应超调?高温度下任何一个环节出现问题都有可能导致FCS系统部分或全部丧失能力。更多的挑战是在消费应用中往往不会意识到的问题(或者影响有限),如定位系统稳定性,定位数据精度等,当面对长航时,情况多变,要求提高的行业应用时却可能严重影响无人机任务完成情况甚至造成重大事故。
面对稳定性问题,从硬件角度出发一般有三类解决方案。最直接的方式是增加备份系统或备份单元(也可称为增加“余度”,但该词多义,谨慎使用)。比如DJI精灵4中双目视觉有两套,IMU两个,强磁计两个。拓攻的Top-D1,T1-S等采用备份FCU来降低系统风险。再有,Top-D1采用了差分GPS(DGPS)系统,支持GPS L1/L2、BDS B1/B2/B3双星五频与双星解算,为行业应用提供更精确的定位信息(有关于DGPS技术,MR.城堡也会在以后的专栏文章中展开)。另外一种方式是增加FCS核心元件质量。比如无人机系统最容易出现数据误差与干扰的强磁计,在FCS设计时根据行业要求与任务情况进行选择。
上面的两类硬件改进途径一方面可以在很大程度上解决行业FCS系统面对的稳定性问题,但另外一个方面也势必会增加系统成本。第三种方法是通过合理的硬件结构设计与制造工艺达到事半功倍的效果。

上图是拓攻Top-D1的硬件图,在每个子模块中采用单独处理器的分布式结构,一方面提高了整个系统以及各子系统的的性能,更重要的是保证了FCS中最关键部分FCU的安全性。从图中看出,FCS通过IMU,OSD,PMU等模块与FCU剥离实现分布式系统结构,这样的设计方式,大家也可以在自己的设计中使用。
算法方面,虽然不清楚拓攻或类似FCS设计商在行业级FCS中是否使用了特殊算法架构,但在行业应用中算法设计不是单独进行的,要配合硬件系统设计以及产品功能实现,这部分内容MR.城堡会在专栏后续文章中进一步展开。
2.功能适应性
不同的行业对无人机硬件系统的内容,软件功能,算法要求都会不同。比如在植保领域,无人机介入该行业的最基本功能是喷洒农药。面对大面积作业范围,要求无人机能够自动完成相关作业任务,否则在全部人为操作下,这项工作很难保证高效实现,且无法进行量化评价。这要求FCS不止针对无人机实现自动控制控制,也要能够将水泵,药夜喷灌系统纳入到控制范畴。从设计角度讲,FCS的设计范畴需要越过无人机进入相关行业。
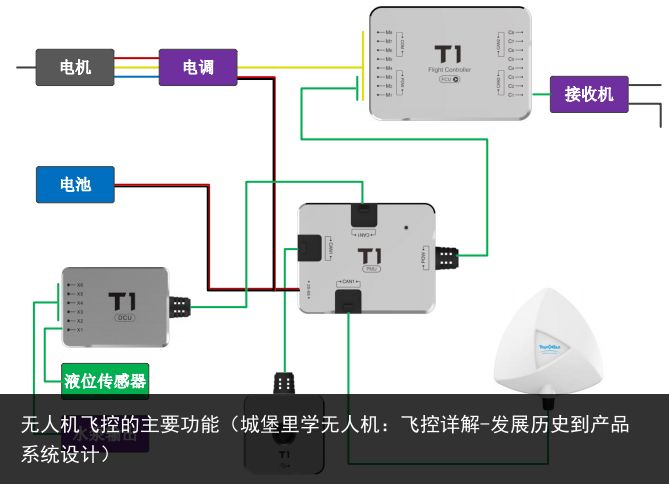
FCS在面对不同行业时,对于功能适应的实现能力有着非常现实的要求。由于DJI、极飞这类提供整机产品的厂家没找到对应的FCS结构图,因此从专门的行业FCS厂商产品分析会容易些。比如拓攻的植保机飞控T1-A(上图),该飞控在硬件结构上专门增添了DCU模块处理喷灌过程的数据反馈,动作信号等。同时将液位数据转化为喷灌量,进一步将喷灌量与飞行速度关联,实现喷药量与作业面积的统一,最后将这种数据关联带入到FCS对应的“智能作业”功能中。
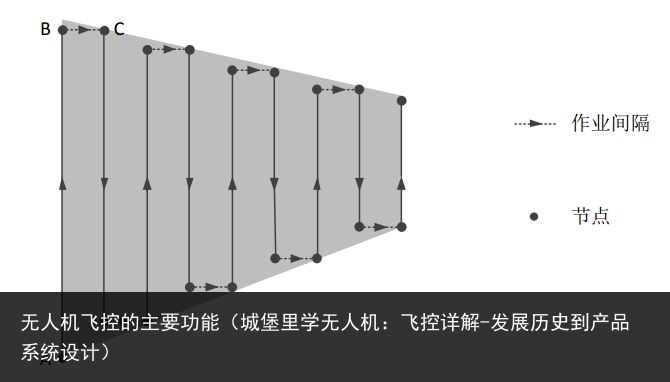
大家可以从类似T1-A这样的行业产品中体会FCS是如何一步步通过硬件结构、算法关联、系统要素最终匹配到植保领域的功能需求上来。这个过程中不同的行业理解,不同的设计方式,会产生不同的行业FCS产品。
3.研发链条延伸
在消费级无人机中,由于环境,法规,硬件成熟度,系统成熟度等原因,研发过程基本能够压缩在产品面世之前,在产品面世之后更多的是固件升级(往往也不会有很多升级版本)。但行业无人机的发展还处在萌芽阶段,对于FCS在各个行业中的应用情况,需求情况,系统匹配等方面存在诸多不确定性(甚至评价方法都不明确),这就要求飞控企业能够找到合适的方式实现产品面市之后的研发链条延伸。
国内专门进行无人机飞控设计与生产的公司往往比较“年轻”。以拓攻为例,成立时间约一年左右,有五款飞控产品面市,这个速度是非常快的,其中通用飞控三款(T1,T1-S,T1-Pro),行业飞控Top-D1,T1-A共两款。这么多产品从侧面说明在实际应用中对于FCS要求上存在着多么大的灵活性与不确定性。产品发布之后,如何实现有效的行业数据反馈?如何在保证用户权益的前提下匹配FCS升级要求?如何实现硬件系统扩展?到底要扩展哪些硬件?如何通过行业指标评价FCS的使用效果?这些都意味这更大的挑战,更多的工作,当然也意味着更多的机遇。
FCS的设计无论是在消费领域还是行业领域都处于非常初始的阶段,产品体系,技术体系,研发脉络,反馈修正方式,硬件设计,算法设计,功能设计,硬件系统扩展,功能扩展等方面都有着很多可以探索的内容。从FCS“组装制作”到FCS“设计”,你能收获的不止是快乐。
城堡无人机工作室公众号:CastleUAVStudio
文中图片来自于互联网




