

无人机 飞控系统(在线课程|无人机飞控固件开发教程)

适用人群
在校学生、无人机相关从业人员,具备一定的C语言基础。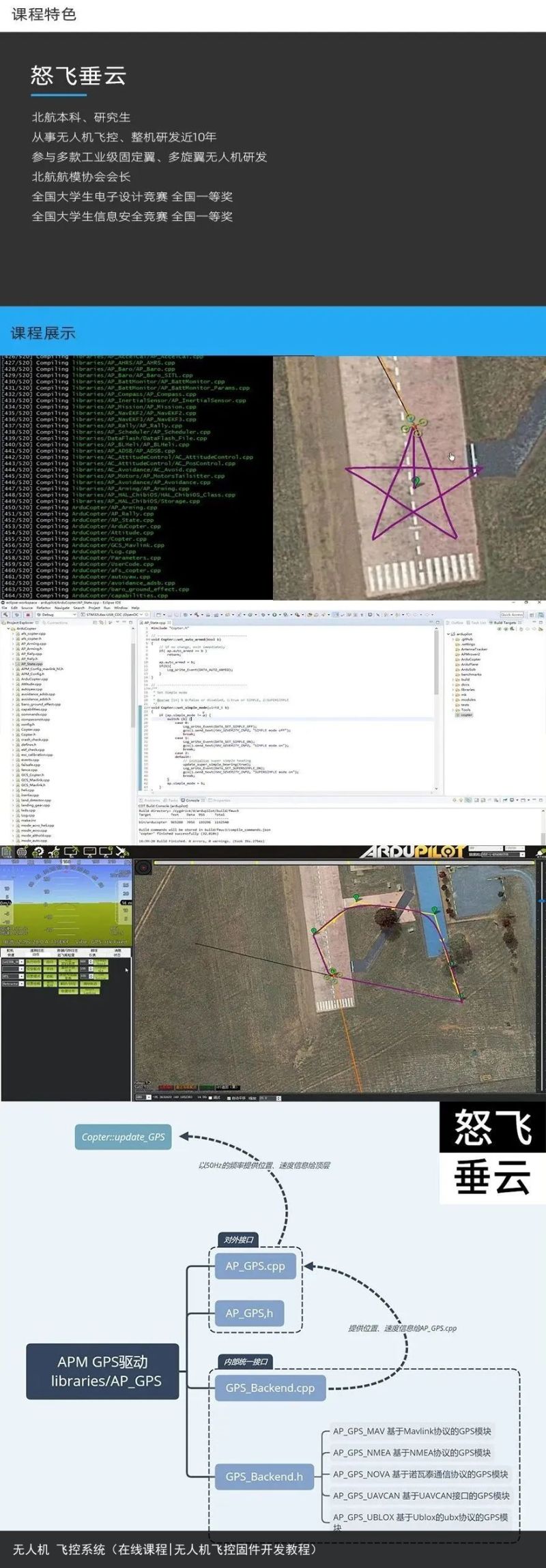 点击下方图片,长按识别以下二维码查看课程
点击下方图片,长按识别以下二维码查看课程 >>>> 推荐阅读(点击下方文章标题可直接阅读)科普|px4入门详解无人机操控入门训练
科普|零零科技新品V型双旋翼控制逻辑分析从技术角度鄙视无人机在防疫中的形式主义快速了解傅立叶变换、拉普拉斯变换、Z变换助力科研——(Simulink)基于模型设计的飞控开发教程点击下方“阅读原文”学习更多无人机知识
>>>> 推荐阅读(点击下方文章标题可直接阅读)科普|px4入门详解无人机操控入门训练
科普|零零科技新品V型双旋翼控制逻辑分析从技术角度鄙视无人机在防疫中的形式主义快速了解傅立叶变换、拉普拉斯变换、Z变换助力科研——(Simulink)基于模型设计的飞控开发教程点击下方“阅读原文”学习更多无人机知识 



