

多旋翼无人机品牌有哪些(多旋翼无人机技术详解)
一. 前言
上一篇文章从技术角度对多旋翼无人机行业的发展过程进行浅析、回顾以及展望,本篇文章将详解剖析多旋翼无人机的技术组成。
二. 多旋翼无人机的技术框架
多旋翼无人机主要由传感器、导航系统、控制系统、动力系统、故障诊断系统、决策及规划系统组成。
传感器作为多旋翼无人机的感知系统的重要组成部分,其作用不言而喻,良好的传感器数据为导航系统的解算提供了扎实的数据基础。
导航系统则结合不同的传感器数据,使用最优估计算法进行多旋翼飞行器的状态参量计算,如飞行器的姿态角、速度、位置等,一个良好的最优估计算法能够为控制系统、故障诊断系统、决策及规划系统提供准确的反馈数据;
控制系统是保障多旋翼飞行器飞行稳定的核心系统,主要由基于反馈的控制算法组成。
动力系统则主要由电池、电机、电调及桨叶组成,该系统为多旋翼无人机提供升力,事实上,该系统也是一个完整的反馈控制系统,其中,电调通过对电机的电流、电压采样形成反馈控制律,控制电机达到预期转速,为多旋翼飞行器提供合适的升力。
故障诊断系统则根据导航系统、控制系统的中间参量进行诊断,实时地给出子系统运行健康状况,如多旋翼无人机的某一组桨叶出现破损,导致飞行器升力不足,此时,故障诊断系统会迅速诊断出该故障,并提示控制系统切换对应的故障预案,以保证飞行器的飞行安全。
决策及规划系统负责实现“业务级”的决策,如无人机的避障与路径规划,电量不足与传感器异常时的紧急预案等。决策与规划系统的优劣决定了该无人机系统的智能化程度以及能力集的大小。
如图1所示为多旋翼无人机技术架构图。
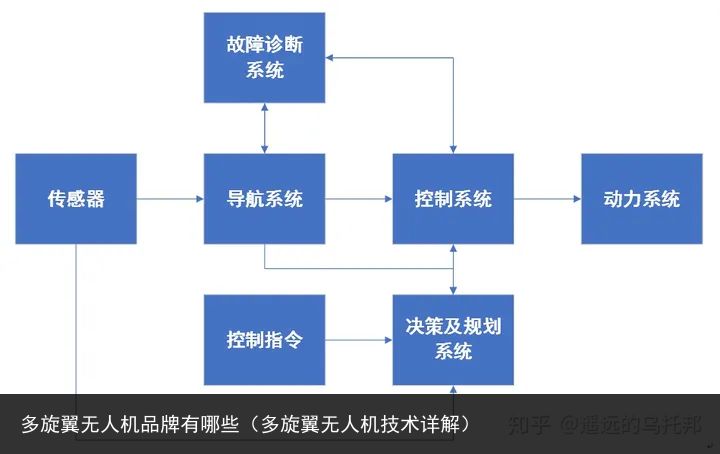 图1 多旋翼无人机技术架构
图1 多旋翼无人机技术架构传感器与导航系统共同组成了“感知与状态估计”子模块,它是多旋翼无人机的“眼睛”。
在该模块中,我们首先需要对传感器原始数据进行分析,根据其特性设计对应的滤波器。部分传感器需要根据安装位置及其偏置量进行校准,如加速度计、陀螺仪以及磁力计等。
在得到精度较高的传感器数据后,需要设计对应的融合算法,构成组合导航系统,用于解算飞行器的各状态量,如姿态角、速度、位置等。如图2所示为组合导航系统框图,图中未将所有状态量列出,如陀螺仪零偏、加速度零偏等,这些状态量与设计的组合导航系统有关。
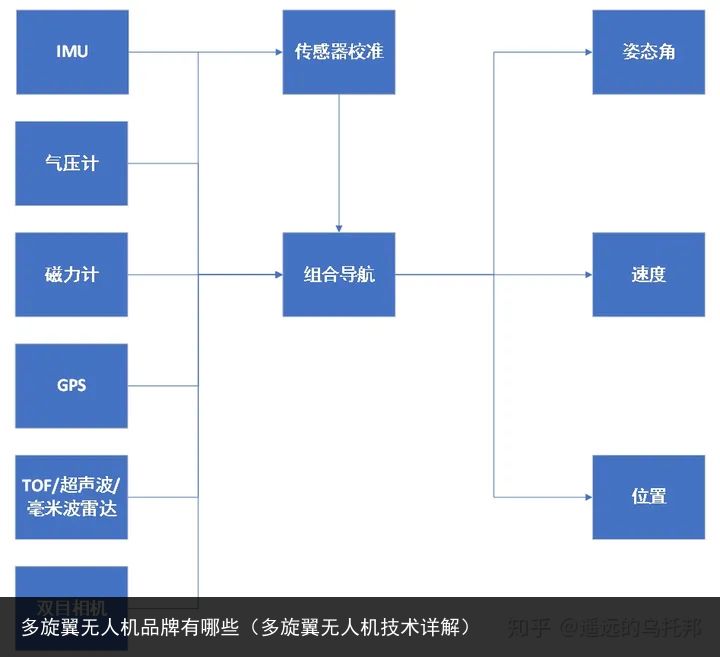 图2 组合导航系统框图
图2 组合导航系统框图控制系统与动力系统则是多旋翼无人机的“手足”。
由于多旋翼飞行器属于静不稳定系统,脱离了控制系统,其自身不具备稳定飞行的能力,这点与固定翼飞行器有非常大的区别。因此,我们需要先对多旋翼飞行器进行数学建模,然后得到其控制分配关系。该表达式描述了多旋翼飞行器的横滚、俯仰、航向以及油门通道之间的耦合关系,只有准确解析出该表达式,才能够在各种飞行状态下,发挥每个电机的“最大潜能”。
故障诊断系统是多旋翼无人机的“医生”。
其综合了传感器数据、导航系统数据以及控制系统数据,对各子模块进行实时运行状态评估。它就如“医生”一般,当系统出现故障甚至是故障的前兆时,故障诊断系统能够及时或提前告知各子模块,这样,各子模块能够及时调整算法策略,以适应不同的飞行状况。
决策与规划系统犹如多旋翼无人机的“大脑”,有了它多旋翼飞行器才能够称之为“空中机器人”。
它掌握着多旋翼飞行器的任务执行策略以及飞行路径,当多旋翼飞行器同时执行多种飞行任务时,也需要它根据任务的优先级以及资源调度的情况进行实时地调整,以最高效的方式完成飞行任务。
三. 总结
多旋翼无人机的技术构成十分复杂,其涉及的技术领域广泛,较为接近机器人的范畴。然而,当前的多旋翼无人机领域依然处于基础技术高速发展的阶段,许多关键技术依然有待突破,在下一个无人机纪元,技术与业务的高度整合将会是多旋翼无人机市场的爆发点!
作者简介: 一个被Coding耽误的无人机算法工程师,控制、导航略懂一二,热衷技术,喜欢乒乓、音乐、电影,欢迎交流。
知乎:@遥远的乌托邦
GitHub: https://github.com/DistantUtopia
微信公众号:@遥远的乌托邦


