

无人机航线规划原理(无人机航线规划软件汇总(1))
当我们想拍摄某些区域的正射影像和倾斜影像时,有款可以自动规划航线的软件(app)是非常实用的,这里我给大家推荐几款比较好用的软件,并在后面的篇幅中会重点描述。总体来说市场上有四五款还不错的软件,包括Altizure,Pix4d,DJI GS pro(ipad版),rockycapture(安卓版)等。首先我来详细描述下Pix4d和altizure这两款app。
1、Pix4d
Pix4d是一款常用的三维重建生成无人机正射影像的软件,其实它也有自己的航线规划软件,很稳定也很实用。
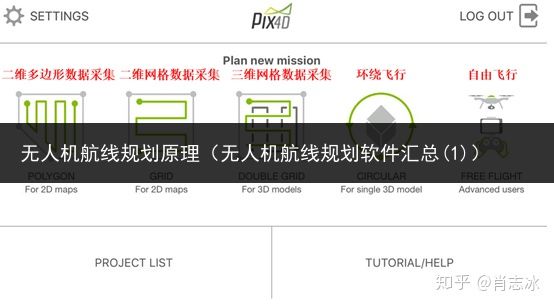
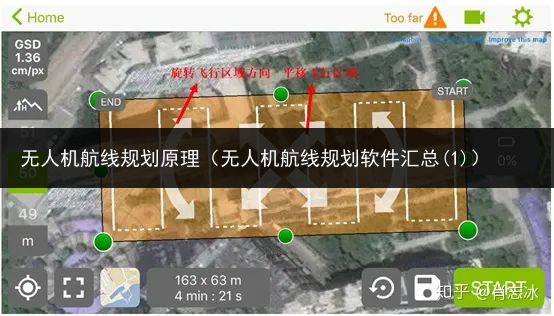
Pix4d主要有5个功能模块。第一个,多边形飞行,主要用于不规则的区域的正射影像数据采集。如下图所示。
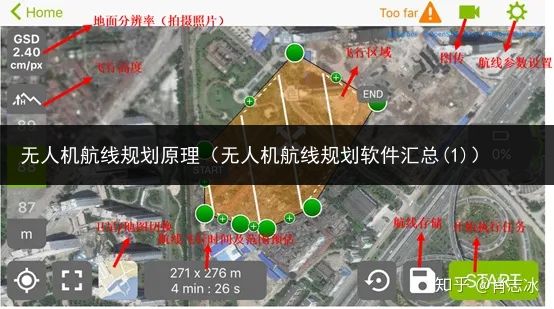
这里需要重点说明一下航线参数设置,如下图所示。重点参数航向重叠率:无人机前进方向拍摄照片与照片的重叠率;旁向重叠率:航线间照片的重叠率。


第二,二维网格数据采集模块。
第三,三维网格数据采集。

第四,环绕飞行,设置与区域飞行不同。如下图所示。


第五,自由飞行与DJI GO/DJI GO4主体功能相同。
2、Altizure
这款软件是比较适合用于小范围的倾斜摄影数据采集。Altizure采用了单镜头模拟五镜头的飞行方法,因此消费级无人机(例如大疆精灵系列)就可以轻松飞出用于三维重建的倾斜摄影数据。图中1,2,3,4,5分别代表无人机正射、前、后、左、右五个角度的数据。其中在航线参数设置中可以设置航线航向、旁向重叠率,相机倾斜角等多个参数。这里有几个关键参数,航向,旁向重叠率,建议设置为≥75%;飞行速度5m/s;任务完成后自动返航;飞行高度比任务区域内的最高建筑物+20m;相机倾斜角40-45°。



结束语:这一期专栏我重点介绍了pix4d和altizure这两款app在apple store 和安卓应用市场都有下载,下一期我将会继续讲解其他的航线规划软件,请继续关注专栏,另外想要相关练习数据的同学,请私信我或者看我前几篇文章里面有python、地理信息数据处理视频、数据等资料下载。




